

LIDS Research
Research at LIDS develops the foundations of decision-driven intelligence and explores how it can be deeply infused into the physical and social fabric of our lives in a sustainable manner. From healthcare and transportation to biological, economic, and social systems, the environments that shape human life are complex, interconnected, and constantly evolving.



LIDS research
The physical world and the social systems that shape human life evolve through complex and deeply interconnected dynamics that we are only beginning to understand. These systems are fundamental to our lives—from transportation and energy networks to biological and economic systems—and they increasingly interact with computing in powerful ways.
At LIDS, we are inspired by the opportunity to harness computing to deepen our understanding of these complex systems and to design technologies that improve the physical world, enrich human interactions, and ultimately expand what humans can achieve. We are motivated to develop computing systems that can make intelligent decisions within physical, societal and sustainable systems.
These new computing paradigms will not only need to be more autonomous and agentic, but they will also need to show success far beyond metrics like prediction accuracy. They will have to better incorporate physical constraints, societal preferences, and sustainable choices.
The intellectual foundation of this work spans learning, optimization, control, and strategic reasoning — the core disciplines of decision-making under uncertainty. These tools yield formal guarantees for autonomous systems, networks, and critical infrastructure, and extend naturally toward algorithms that shape human interactions and societal outcomes at scale. Building on these foundations, we develop practical algorithms, create deployable systems, and collaborate directly with application domains — from energy grids and healthcare to transportation, economics, and the life sciences — bringing principled approaches to fields where intelligent decision-making can be transformative.
Our focus areas represent the key pillars of this vision. Each brings together a broad set of important challenges whose solutions are essential for enabling a world in which computing is deeply embedded in the physical world and the social fabric of human life.
Our research fields reflect the foundational areas of scholarship that our researchers are advancing and shaping to address these challenges. These research fields span a wide intellectual spectrum—from statistics, optimization, and information theory to reinforcement learning and behavioral science.
Across a diverse set of impact areas, LIDS research is motivated by pressing societal challenges, emerging technological opportunities, and critical needs across industry and society. Inspired by real-world applications, our work aims to generate transformative advances that improve systems central to human life and expand the possibilities of what computing can achieve.
Focus areas
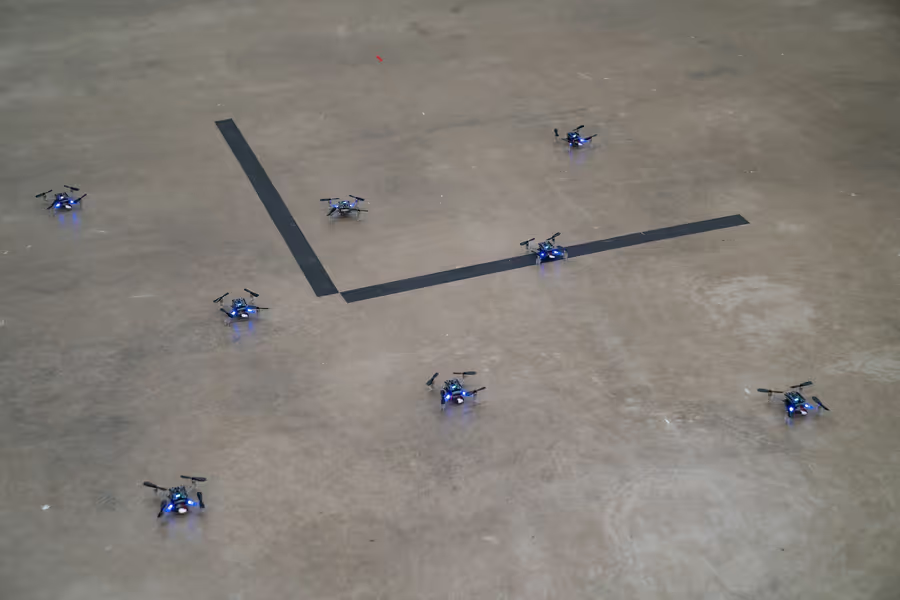

The ability to reason and make critical decisions will enable computers to take on tasks with unprecedented complexity. LIDS research has made pioneering contributions that enable autonomous systems and agents to successfully perform important tasks in the physical world.


As computing continues to infuse into the physical and social fabric of our lives, its societal implications take on a critical importance. LIDS research has provided key insights into some of the most pressing issues, for example, in healthcare and human resources.

As the footprint of computing continues to grow, so does its impact on our energy infrastructre, our supply chains and our planet. LIDS research has helped identify pressing issues and found solutions to support the growing footprint of computing.

LIDS is a center of gravity at MIT for machine learning research. LIDS research has made pioneering contributions to machine learning theory, algorithms and applications, including key advances in relevant disciplines, such as statistics, optimization and game theory.
Research Fields
LIDS researchers study strategic interactions among multiple decision-makers, whether human or artificial. This work informs the design of algorithms and mechanisms for cooperative and competitive environments, enabling robust coordination in markets, networked systems, and multi-agent AI.

Information theory provides the mathematical foundations for understanding the limits of communication, compression, and learning from data. LIDS researchers extend these foundations to modern applications such as communications, data science, and machine learning.
Optimization lies at the core of many algorithms for learning, inference and decision making. LIDS researchers develop new mathematical methods and algorithms that help power sophisticated optimization procedures.


LIDS researchers develop core methodologies and algorithms in control theory, reinforcement learning and sequential decision making to enable systems that can learn to make decisions through interaction with their environment. These advances support adaptive and resilient technologies ranging from robotics and autonomous vehicles to energy systems and industrial automation.

Research in statistics at LIDS develops principled methods for extracting reliable insights from data. These tools enable scientists and engineers to model uncertainty, draw meaningful conclusions, and make informed decisions in fields spanning healthcare, engineering, economics, and public policy.
LIDS contributes to the fundamental understanding of computation through its own lens with sophisticated modern mathematical methods. This work shapes the design of algorithms and computational systems that underpin modern technologies, including machine learning and artificial intelligence.


Researchers at LIDS develop the mathematical principles that explain why and when machine learning algorithms succeed. This work enables us to better understand existing empirically-successful methodologies such as transformers, establishes guarantees for learning systems, improves their reliability and efficiency, and guides the development of new algorithms capable of learning increasingly complex models from ever larger data.
Imapct areas


LIDS research advances the autonomy, safety, and efficiency of aerospace systems, including aircraft, satellites, and space exploration platforms. These technologies enable more capable air and space transportation, resilient space infrastructure, and new capabilities in Earth observation and planetary exploration.


LIDS researchers develop data-driven and autonomous technologies that improve agricultural productivity, resource efficiency, and food system resilience. These innovations support precision agriculture, sustainable food production, and more reliable global food supply chains.

Advances in communications research at LIDS enable faster, more reliable, and more efficient information exchange across wireless, optical, and networked systems. These innovations underpin modern digital infrastructure, from mobile networks and the internet to emerging distributed sensing and computing platforms.

LIDS research develops algorithms and systems for managing complex energy networks, including power grids, renewable generation, and energy storage. These tools enable more resilient, efficient, and sustainable infrastructure as societies transition to cleaner and more distributed energy systems.

LIDS researchers apply methods from statistics, optimization, and machine learning to better understand financial markets and design more robust financial systems. These approaches improve risk management, market stability, and data-driven decision-making in increasingly complex economic environments.


LIDS research enables data-driven healthcare systems that improve diagnosis, treatment planning, and public health decision-making. By integrating machine learning, statistical inference, and optimization, these advances support more personalized, efficient, and equitable healthcare delivery.

LIDS advances the perception, learning, and planning algorithms that enable robots and autonomous vehicles to operate safely and reliably in complex environments. These systems promise to transform many industries such as transportation, logistics, manufacturing, inspection and more.

LIDS researchers develop models and decision tools that help society better understand and manage environmental systems. These technologies support climate mitigation, resource management, and sustainable development in the face of global environmental change.

LIDS research improves the efficiency, safety, and resilience of transportation networks across air, land, and sea. Through advances in optimization, control, and data-driven modeling, these systems enable smarter mobility and more sustainable transportation infrastructure.
The laboratory leads key research initiatives that brings together our researchers and the relevant industry
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis.


Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis.


Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis.

Stay up-to-date with the LIDS Latest newsletter





Massachusetts Institute of Technology
Room 32-D608
77 Massachusetts Avenue
Cambridge, MA 02139

